-
[CodeKata] 프로그래머스: 12.19(일), 블록 이동하기Algorithm 2021. 12. 19. 18:18반응형
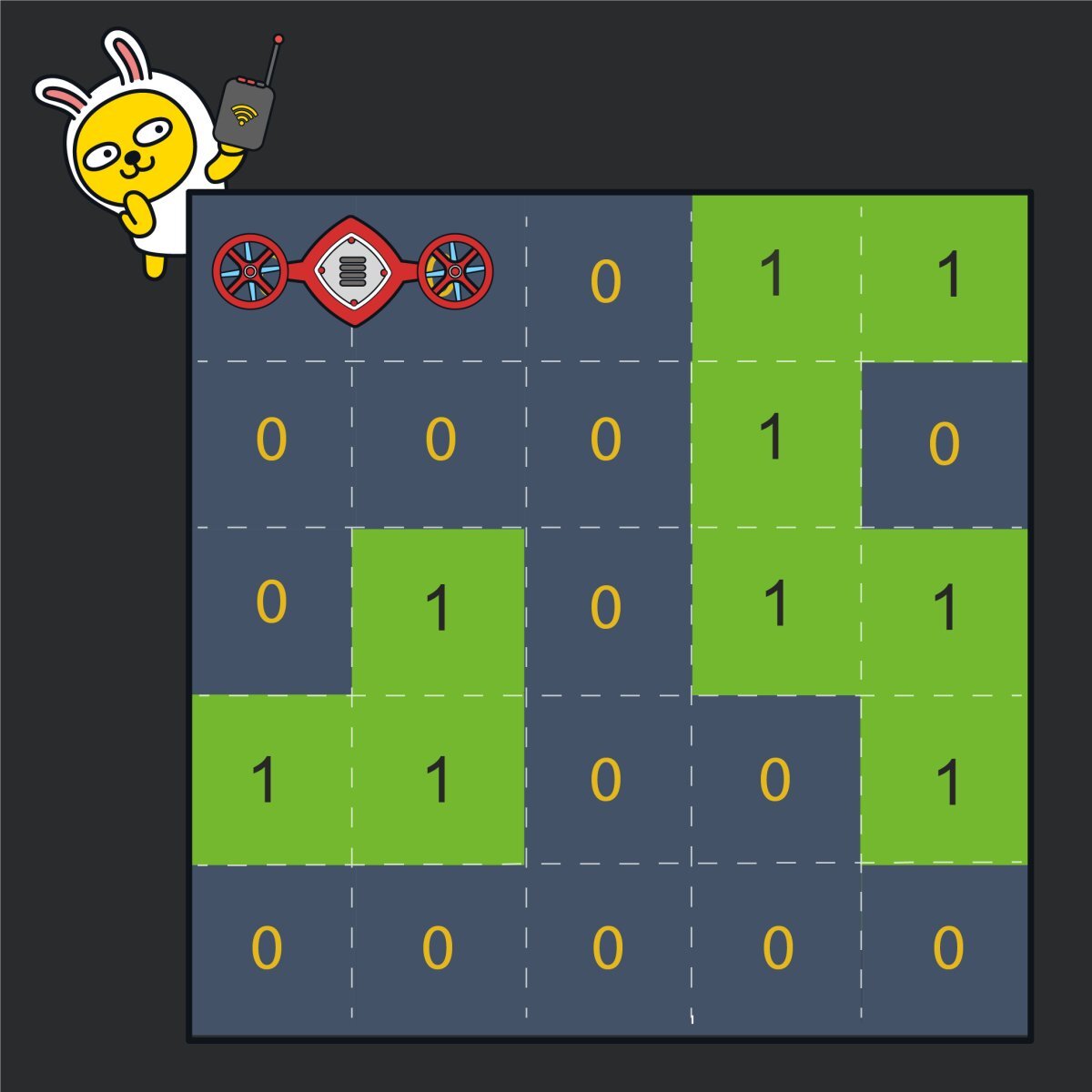
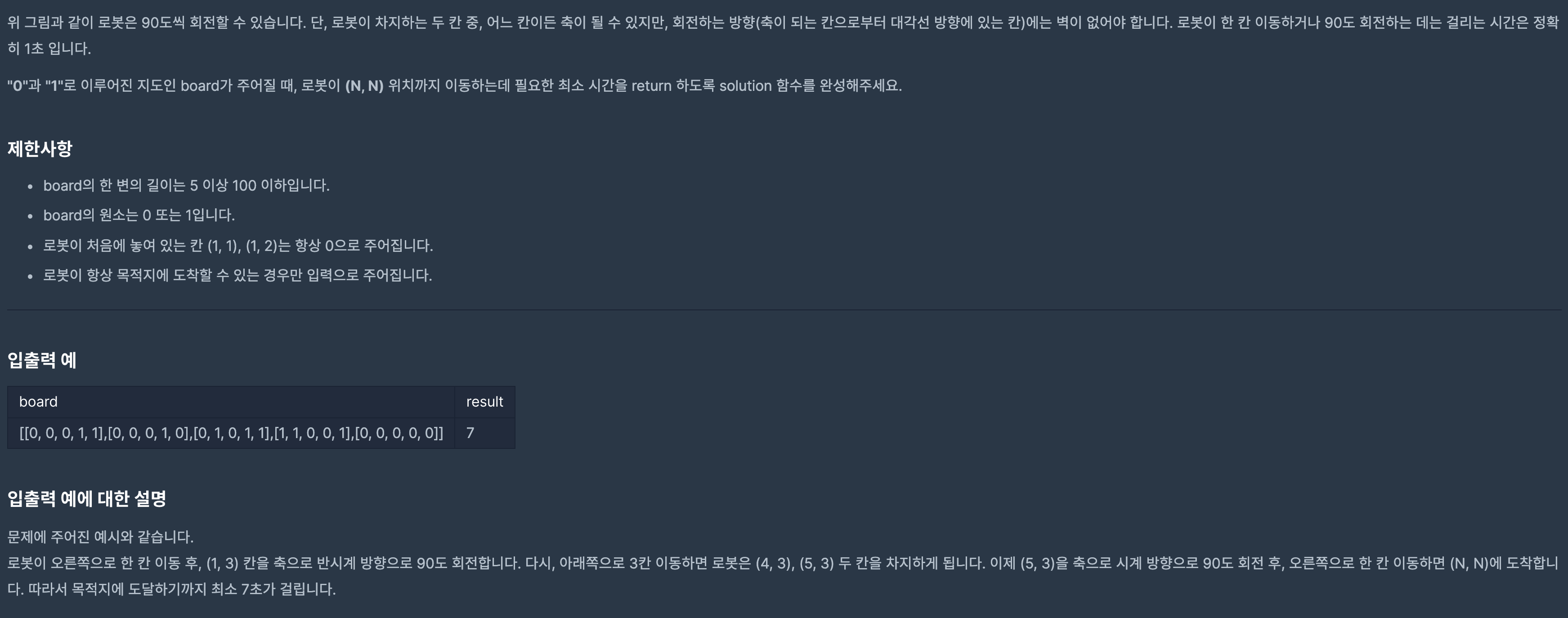
🥋 Oooth More!! (Level 3)



🧮 풀이
check배열로 방문을 기록하면서 DFS로 풀어보려 했으나, 방법이 모호했으며 무엇보다 회전하는 경우를 고려하기가 힘들었다.
이번에도 눈물을 머금고... 모범답안의 힘을 빌리기로 했다!
🖇 리뷰
최단경로를 탐색하는 문제이므로 BFS를 사용해야 한다. 이 때, 회전까지 고려해야하는 부분이 어려웠는데 모범답안으로 학습해보았다.
function solution (board) { const N = board.length; const goal = N + '' + N; const queue = [ [ [1,1], [1,2], 0 ] ]; const visit = new Set(["1112"]); const new_board = new Array(N+2).fill().map(_ => new Array(N+2).fill(1)); for(let i = 0; i < N; i++) { for(let j = 0; j < N; j++) { new_board[i+1][j+1] = board[i][j]; } } while(queue.length) { const [left, right, count] = queue.shift(); if(left.join('') === goal || right.join('') === goal) return count; const nextPosition = getNextPosition(left, right, new_board); for(const next of nextPosition) { const [next_left, next_right] = next; const key = next_left.join('') + next_right.join(''); if(!visit.has(key)) { queue.push([next_left, next_right, count+1]); visit.add(key); } } } } const getNextPosition = (left, right, board) => { const result = []; const X = 1, Y = 0; const moves = [ [-1,0], [1, 0], [0,-1], [0,1] ]; for(const move of moves) { const [dy, dx] = move; const next_left = [ left[Y]+dy, left[X]+dx ]; const next_right = [ right[Y]+dy, right[X]+dx ]; if(board[next_left[Y]][next_left[X]] === 0 && board[next_right[Y]][next_right[X]] === 0) { result.push([next_left, next_right]); } } const toward = [-1, 1]; if(left[Y] === right[Y]) { for(const dy of toward) { if(board[left[Y]+dy][left[X]] === 0 && board[right[Y]+dy][right[X]] === 0) { result.push([ left, [ left[Y]+dy, left[X] ] ]); result.push([ [ right[Y]+dy, right[X] ], right ]); } } } else { for(const dx of toward) { if(board[left[Y]][left[X]+dx] === 0 && board[right[Y]][right[X]+dx] === 0) { result.push([ [left[Y], left[X]+dx ], left ]); result.push([ right, [ right[Y], right[X]+dx ] ]); } } } return result; }1. BFS를 위한 준비
- N은 board 길이로 빈번히 사용될 값이다. goal은 목표좌표로, "NN" 형태이다. (N-1이 아닌 이유는, 아래 new_board 확장때문!)
- 또, BFS를 위한 queue 배열을 선언하고, [왼쪽, 오른쪽, count] 형태로 초기값으로 넣어준다. visit은 방문한 케이스를 관리하는 Set로 "x1x2y1y2"를 담는다.
- 로봇 좌표가 [[0,0], [0,1]] 이 아닌 이유가 이 new_board(확장된 board) 에 이유가 있다. 로봇의 이동 및 회전이 board를 벗어날 때 에러를 쉽게 관리하기 위해, board 테두리를 1(벽)으로 감싼 new_board 를 활용하는 것이다. new_board의 [i+1][j+1] 값은 기존 board[i][j]와 같다.
- queue가 존재하는 동안 while 반복문을 시행한다. 현재값을 [left, right, count]로 빼고, left나 right가 정답(goal)이면 count를 반환한다. 아니라면, nextPosition을 queue에 넣어줘야 한다. 여기서 getNextPosition() 함수를 한 번 면밀히 짚고 넘어가자!
2. getNextPosition()
- 로봇의 이동(상하좌우) 및 회전을 했을 때, 이동 가능한 좌표들을 반환하는 함수다. 인자는, left, right, board 3가지를 받는다.
- 최초 설정시, [y1, x1], [y2, x2] 형태로 선언했다. 그렇기에, Y좌표는 0번째, X좌표는 1번째로 상수를 설정해놓는다.
- result는 이동/회전이 가능한 좌표들을 담을 배열이다. 먼저, 상하좌우 좌표를 next_left, next_right로 만들고 여기의 board 값이 0이라면 이동이 가능하므로 result에 push 해놓는다.
- 다음은 회전 경우이다. 로봇이 가로방향 이라면 위/아래, 세로방향 이라면 왼/오른쪽이 모두 벽이 없어야만한다.
- toward는 -(위 혹은 왼쪽), +(아래 혹은 오른쪽) 2가지 경우다. 또한, left[Y], right[Y] 가 같으면 가로, 다르다면 세로의 경우이다.
- 가로일 땐, toward 변화량을 dy(세로)로 잡는다. 그 때, 위 혹은 아래가 벽이 아니라면, 왼쪽 및 오른쪽 좌표를 기준으로 각각 상향 혹은 하양한 좌표들을 result에 push 한다. (첫 번째는 [left 고정, left 위 혹은 아래], 두 번째는 [right 위 혹은 아래 , right 고정])
- 세로일 땐, toward 변화량을 dx(가로)로 잡는다. 그 떄, 왼쪽 혹은 오른쪽이 벽이 아니라면, 위 및 아래 좌표 기준으로 각각 좌향 혹은 우향한 좌표들을 result에 push 한다. (첫 번째는 [left 왼쪽 혹은 오른쪽, left], 두 번째는 [right, right 왼쪽 혹은 오른쪽])
3. 다음 경로들 BFS로 계산
- 다시 while 반복문에서, nextPosition은 getNextPosition() 함수로 획득한 현재 좌표에서 갈 수 있는 다음 좌표들의 배열이다.
- 이 nextPosition 들을 순회하면서, visit에 포함되있는지 확인한다. 없다면, 이를 queue에 넣어주고 visit에도 추가한다.
반응형'Algorithm' 카테고리의 다른 글
[CodeKata] 프로그래머스: 1.10(월), 기지국 설치 (0) 2022.01.10 [CodeKata] 프로그래머스: 12.28(화), 풍선 터트리기 (0) 2021.12.30 [CodeKata] 프로그래머스: 12.12(일), 카드 짝 맞추기 (0) 2021.12.13 [CodeKata] 프로그래머스: 11.28(일), 단속 카메라 (0) 2021.11.28 [CodeKata] 프로그래머스: 11.21(일), 매칭 점수 (0) 2021.11.21